Positionstoleranzen
Die Einstellung der Registerkarte Positionstoleranzen dienen der Berechnung der Abweichungsbeträge zur grafischen Darstellung, haben jedoch keinen Einfluss auf die Berechnung der Fähigkeitskennwerte.
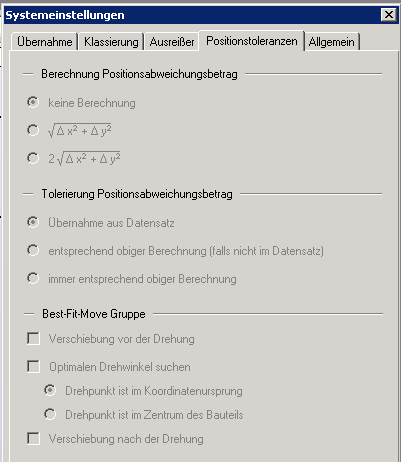
Berechnung Positionsabweichungsbetrag
•
Keine Berechnung.
Das Programm berechnet keine
Positionsabweichung.
•

Das
Programm berechnet den Betrag der Positionsabweichung als Länge des Vektors von
der Sollposition zur Istposition.
•

Das
Programm berechnet die Positionsabweichung als Kreisdurchmesser, so dass der
direkte Vergleich mit dem zulässigen Toleranzkreis möglich ist.
Tolerierung Positionsabweichungsbetrag
•
Übernahme aus Datensatz
Das Programm übernimmt die
Positionstoleranzen aus dem Datensatz.
•
entsprechend obiger Berechnung (falls nicht im Datensatz)
Das
Programm übernimmt die Positionstoleranzen aus dem Datensatz. Ist keine
Positionstoleranz im Datensatz vorhanden, so berechnet das Programm diese.
•
immer entsprechend obiger Berechnung
Das Programm berechnet in
jedem Fall die Positionstoleranz aus den Einzeltoleranzen für die Koordinaten x
und y.
Hinweis:
Das Programm berechnet die Positionstoleranzen aus den Einzeltoleranzen für die Koordinaten X und Y. Sind die Toleranzen für die X- und Y-Koordinaten unterschiedlich groß, so ergibt sich als Positionstoleranz eine Toleranzellipse. Sind die Toleranzen für die X-Koordinate und die Y-Koordinate gleich, so ergibt sich ein Toleranzkreis.
Best fit Move Gruppe
Das Programm kann für ein Teil, bei dem mehrere Positionen toleriert sind, Vorschläge für eine Lagekorrektur des Teiles berechnen. Es werden dabei die Istpositionen mit den Sollpositionen verglichen und je ein Korrekturwert für die Verschiebung des Teiles in X- und Y-Richtung ausgegeben und ein weiterer Korrekturwert, der den Drehwinkel des Teiles zur Solllage ausgleicht.
• Verschiebung vor der Drehung
Das Programm berechnet zunächst die Abweichungen in X- und Y-Richtung. Danach berechnet das Programm den Drehwinkel.
• Optimalen Drehwinkel berechnen
o Drehpunkt ist im Koordinatenursprung
Der Drehwinkel wird mit Bezug auf den Koordinatenursprung berechnet
o Drehpunkt ist im Zentrum des Bauteiles
Der Drehwinkel wird mit Bezug auf den berechneten Schwerpunkt aus den Sollpositionen von allen X- und Y-Positionen berechnet.
• Verschiebung nach der Drehung
Das Programm berechnet zunächst den Drehwinkel und anschließend die verbleibenden Verschiebungen in X- und Y-Richtung.